
步进电机(步进电机的构造(以5相步进为例))
发布日期:2021-03-10 18:00 作品声明:内容由AI生成
步进电机的结构主要由图片说明。步进电动机的结构大致分为两部分:定子和转子。转子由三部分组成:转子1,转子2和永磁钢。并且转子被轴向磁化,使得如果转子1为N极,则转子2为S极。 定子有10个小的锯齿状磁极,全部为线圈状。线圈对角线位置的磁极相互连接,电流流过后,线圈便以相同极性磁化。 (例如,当特定的线圈流过电流时,对角线上的极会同化为S极或N极。)对角线上的两个极形成一个相,因此由于存在五个相A,所以要经过五个相到E称为电动机。
定子有10个小的锯齿状磁极,全部为线圈状。线圈对角线位置的磁极相互连接,电流流过后,线圈便以相同极性磁化。 (例如,当特定的线圈流过电流时,对角线上的极会同化为S极或N极。)对角线上的两个极形成一个相,因此由于存在五个相A,所以要经过五个相到E称为电动机。 系统图
系统图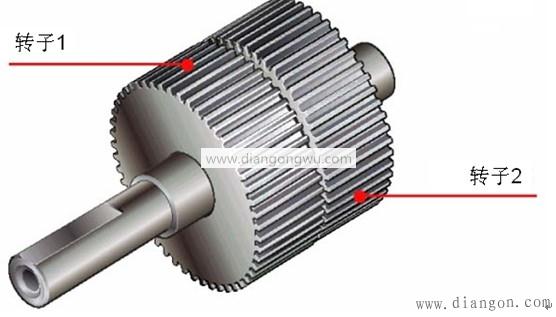 转子的外圈由50个小齿组成,转子1和转子2的小齿在结构上以1/2节距错开。结果,转子具有100个小齿。当前,高分辨率类型的转子具有一个加工了100个齿的转子,因此高分辨率类型的转子具有200个小齿。因此,可以以机械方式实现一般步进电动机半步的分辨率(一般步进电动机半步需要细分电气来实现)。
转子的外圈由50个小齿组成,转子1和转子2的小齿在结构上以1/2节距错开。结果,转子具有100个小齿。当前,高分辨率类型的转子具有一个加工了100个齿的转子,因此高分辨率类型的转子具有200个小齿。因此,可以以机械方式实现一般步进电动机半步的分辨率(一般步进电动机半步需要细分电气来实现)。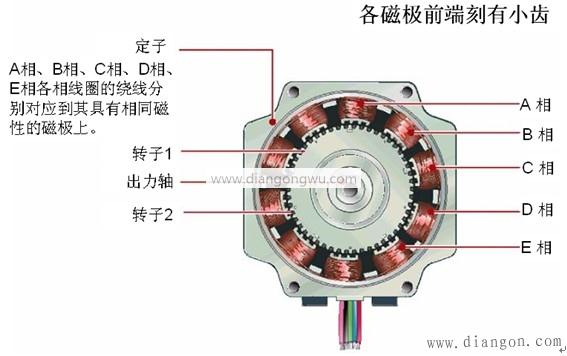 电机结构图2:垂直于轴的横截面
电机结构图2:垂直于轴的横截面
新闻资讯NEWS
产品中心PRODUCTS
相关内容