
伺服系统的组成包括哪些部分(直流伺服系统的组成和控制原理)
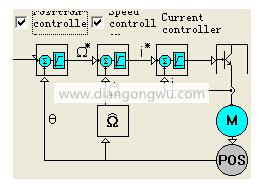
DC伺服类似于AC伺服,可以采用控制器开环控制方式,控制器半闭环控制和全闭环控制系统。
DC伺服系统控制面板的结构如下。面板的右侧是与直流伺服电机接口板的接口,包括电机驱动器接口和编码器接口。界面左侧。运动控制器面板包括位置控制模式界面和速度控制模式界面。
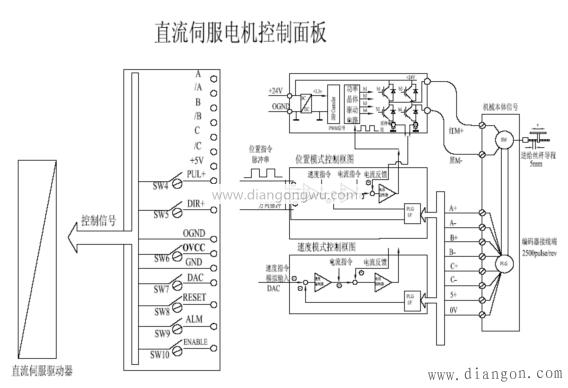
M +,M-信号是用于驱动电动机运动的直流无刷伺服电动机的电源线。
A +,A-,B +,B-,C +,C-,5 +,0V信号是用于反馈电机轴实际位置的编码器信号。
A,/A,B,/B,C,/C,+ 5V,PUL +,DIR +,OGND,OVCC,GND,DAC,RESET,ALM,ENABLE是连接到控制器的控制信号。
表示:
A,/A,B,/B,C,/C是驱动器反馈给运动控制器的编码器信号。
+ 5V是电源。
PUL +,PUL-是在位置模式下用于电机控制的脉冲信号。
DIR +,DIR-是在位置模式下用于电机控制的方向信号。
OGND,OVCC和GND分别是模拟地,模拟电源和数字地。
DAC是驱动器接收的模拟控制信号,范围通常为-10V-10V。
RESET,ALM和ENABLE是分别表示逆变器的复位,警报和激活功能的控制信号。
直流伺服驱动器通常具有速度控制模式和位置控制模式。
采用位置模式时,输入控制信号为脉冲和方向(或正负脉冲),采用速度模式时,输入控制信号为模拟正信号。驱动器通过速度控制器将输入信号转换为速度控制信号,并将其转换为电流控制信号。电流信号通过PWM环路施加到功率放大器模块的输出模块,最后施加到电动机。
DC伺服驱动器采用IDM,只能用作伺服驱动器。
IDM240/640是嵌入式智能高精度全数字伺服驱动器,可以驱动方波或正弦波无刷伺服电机(PMSM),直流伺服电机,并可以配置多个分布式智能网络运动系统。具有多达256个轴的嵌入式高级可编程运动语言(TML)提供了各种高级运动控制和PLC特殊功能。
主要功能如下。
分布式智能,单轴主控制操作或从轴模式
控制模式:位置,速度,转矩,电压,外部变量
运动模式:脉冲+方向,电子齿轮,轮廓,轮廓
可编程保护:位置故障,过流,过压或欠压,I2t,
DSP控制技术:基于MotionChipTM技术
RS232/485串行接口,波特率可以达到115KB。
CAN2.0本地总线,与CANopen兼容,波特率高达1MHz
输出电流:连续电流5A/8A,峰值电流16A,
电源电压:12-48VDC(IDM240),12-48VDC(逻辑电源)/80V(电动机)(IDM640)
紧凑的结构设计:136 x 84.5 x 26mm
控制软件采用Easy Motion Studio,控制软件的特征如下。
EasyMotion Studio平台是一种先进的图形评估和分析编程工具,可让您快速设置电动机和驱动器参数以及运动程序程序。 TML_LIB功能库是用于智能伺服驱动器以运行运动控制应用程序的功能库。调用Delphi开发的应用程序库中的.DLL文件,C/C ++中的Labview,基本端口状态等后,与驱动程序直接通信,参数设置,状态查询,发送命令,运动事件定义,测试输入和输出。
IDM640入门套件:包含驱动器的完整组件,包括IDM640驱动器,电机,I/O板,EasyMotion Studio软件,应用程序帮助和完整文件。它是测试运动控制程序的理想实验平台。以上所有内容都包含在准备运行的即插即用组件中。

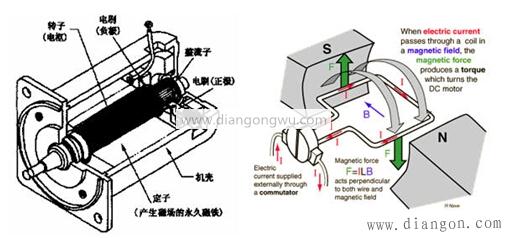
DC伺服电机包括以下组件。
定子:磁场永久磁铁
转子:电枢绕组
换向:换向器和碳刷
施加到直流电动机上的直流电通过借助换向器和电刷使流过直流电动机电枢线圈的电流方向发生变化,从而改变了电枢产生的电磁转矩的方向。它不会更改直流电动机以使其沿特定方向旋转。
DC Servo :的优势
?精确的速度控制
?转矩速度特性非常困难
?原理简单易用。
?价格优势
缺点:
?电刷换向
?速度限制
?额外阻力
?产生磨损颗粒(用于洁净室)