57步进电机驱动器拨码(步进电机为什么要加驱动器?)

步进驱动器的结构:。
步进司机可以分为两部分。零件是环形分配器,其他部件是功率放大。 环形分配器:接收三个信号,脉冲信号,方向信号和离线信号。然后分布脉冲信号,当相应的晶体管在相应的晶体管中接通时,步进电机的线圈被提供给电力。在这里,我们可以看到应该运行步进电机。然后,您必须输入脉冲。如果没有脉冲,步进电机不会移动,因此您需要一个驱动器,可顺序地激活步进电机的绕组。 方向信号:AB功率,A-B顺时针,B-A顺时针控制控制。 离线信号:如果停止步进电机,如果AB线圈具有相位保存,则电源功能锁定,因此当转子不会移动时,必须提供离线信号。由于AB相风功率组完全电源,转子可以自由旋转。

步进电机,步进驱动器和PLC之间的连接:。

步进驱动器首先将DC电源24至28V连接到电动机,另一端作为输入信号是控制信号,并且将步进电机作为脉冲信号隔离为外部信号。在PLC内部,我们可以不断地开启并打开脉冲以产生脉冲以产生脉冲以使PLC脉冲产生脉冲。
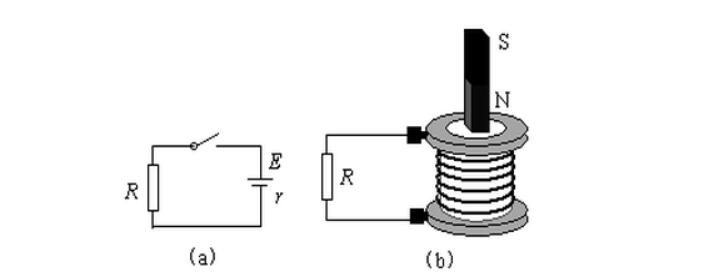
当y0匝开启时,电流限制电阻器,二极管通过CP +到CP +,然后通过构成环路的COM侧返回到电源的负端。以这种方式,发光二极管接通,晶体管也产生高电平1,并且如果截止日期产生低电平0,因此当Y0恒定地打开并切割时,脉冲可以从脉冲转移到驱动器外部设备。然后接收环形分配器并分配脉冲信号。步进电机的绕组随时间控制。因此,当没有脉冲时,步进电机必须具有脉冲,并且如果没有脉冲,则停止步进电机。方向信号也与去除信号相同。 用于细分阶段驱动分段设置信息的步进驱动程序 什么是细分?为了提高步骤电动机控制的精度,电流级联操作具有分开功能,所谓的细分,并且通过驱动器的电路电路减小了步进角度。 例如,将步进器驱动器设置为5年越长,原始步进角度为1.8°,5分钟后,步进角度为0.36°。换句话说,可以完成原始步骤,并且必须采取5个步骤。可以直接从驱动器查看步进电机的常见步骤。 设置:时做笔记 一般来说,如果控制脉冲频率是恒定的,分割越大,电机较慢,所以你不能设置太多的细划分,因为电机速度慢,可以减少电机的输出时刻。 如图1所示。如图2所示,驱动步进电机的脉冲频率太高,通常为2kHz或更小,否则来自电动机的扭矩迅速减小。

步进电机驱动器的细分表:。