
什么叫步进电机(反应式步进电动机的工作原理)
步进电动机的输入功率是脉冲电压,有一个输入脉冲,电动机以一定角度旋转。这是一种“逐步”旋转的电动机,因其旋转角度与输入电脉冲数严格成正比而得名。通过改变输入脉冲的频率,可以广泛,平稳,连续地调节输出速度。它也是唯一能够执行开环控制的执行电器,广泛用于简单和经济的数控装置的修改和设计中。
与步进电动机有关的术语:
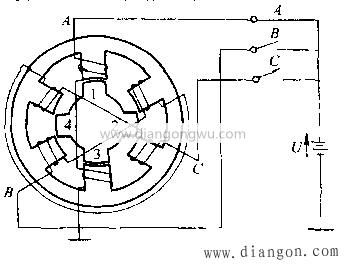
常数:电动机定子具有极数,极对数是相数。有六个极,它们是三相步进电动机,如图1所示。 5相步进电动机有10极。
位数:每次电动机定子绕组改变传导模式时,这称为位数。
步距角:转子旋转一位的空间角,用符号a表示。
齿距角:这是转子在空间中的齿距角。例如,转子具有N个齿,桨距角=360°/N。
步进电机由定子和转子组成。定子和转子磁极上有齿。定子极的磁宽度和磁槽应与磁槽的磁宽度和磁槽相同。转子。
公式中的m相数
k-1、2、3,正整数。
例如,对于三相步进电动机,转子齿数为40,上式为z=2m(k±1/m),k为7并建立了方程。转子齿数为40个,可以满足错齿的要求,说明步进电机的结构是合理的。
步进电动机的步进角α由下式确定。 a=360°/mzc
其中z转子齿数
m常数
c因子,c=1或2。因子c与步进电动机的通电模式有关。当连接到两个相邻位的定子的极数相同时,c=1,当它们的极性不同时,c=2.360°/mz是定子相对于转子的交错螺距角。
步进电机的速度n(r/min)与通电频率f成正比。即
n=60a°/360°=60f/mzc(r/min)
当步进电机以传动比i(i=z1/z2)和驱动螺杆螺距t通过传动系统时,脉冲当量δ(mm/pulse)为: δ=tai/360°=ti/mzc
步进电动机的相位和齿数越多,步进角越小,等效脉冲越小。可以提高加工精度,但是电源也很复杂。目前,相对较小的步距角通常为0.75°,脉冲当量通常为0.01mm。常用步骤数为3或5步,最多6步。
步进电动机有单拍、双拍、单双拍几种不同的通电方式,以三相步进电动机为例:
(1)三相单相3位功率模式:一次只给一个相通电,然后按A→B→C→A的顺序重新通电。由于一次只能给一个相通电,因此在绕组接通时电机会失去自锁转矩,并且其稳定性很差。步距角系数c=1。
(2)三相双三拍通电方式:两相按AB→BC→CA→AB的顺序周期性地同时通电。由于每次都通电两级,因此切换时不会损失自锁扭矩,稳定性更好。步距角系数c=1。
(3)三相单双三拍(六拍)通电方式:即使按A→AB→B→BC→C→CA→A的顺序打开电源,稳定性也很好。由于一个齿的螺距一次为6位,因此步距角为另外两个,即步距角因子c=2。