
中间继电器接线图(交流伺服电动机的结构和接线图解)
AC伺服电动机的结构与普通的单相异步电动机的结构相似,并且定子绕组与单相电容性异步电动机的定子绕组相似。在空间中有两个绕组相隔90o。励磁绕组.WF,另一个是控制绕组WC,这两个绕组通常连接到单相电容式异步电动机和两个不同的交流电源(相同频率,不同相位)。转子通常分为两种结构类型:鼠笼式转子和杯形转子。鼠笼式转子的结构与三相鼠笼式电动机的结构相似,并且在图中示出了杯形转子结构。杯形转子通常由铝合金或铜合金制成,以形成空心的薄圆柱体,并在空心杯形转子上放置一个固定的内部定子以减小磁阻。各种构造类型的转子被制成具有较小惯性的细长形状。当前,鼠笼式转子是更常用的。
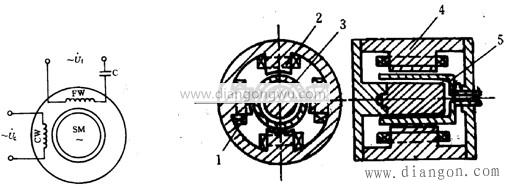
图1交流伺服电动机的接线图杯形转子伺服电动机的结构图
交流伺服电机基于单相异步电动机原理。励磁绕组WF连接到交流电网,电压为 ,控制绕组连接到控制电压
,控制绕组连接到控制电压 。当输入控制信号时,两相绕组产生旋转磁场。磁场与转子中感应的电流相互作用以产生转矩,从而使旋转磁场根据旋转磁场以恒定的滑差速度旋转。旋转速度为
。当输入控制信号时,两相绕组产生旋转磁场。磁场与转子中感应的电流相互作用以产生转矩,从而使旋转磁场根据旋转磁场以恒定的滑差速度旋转。旋转速度为 ,其中f是交流电源的频率,Hz,P。是极对数,
,其中f是交流电源的频率,Hz,P。是极对数, 是电动机的旋转磁场速度
是电动机的旋转磁场速度 ,S是滑差速度
,S是滑差速度 。通过将控制电压的相位更改为180°,可以更改伺服电机的旋转方向。
。通过将控制电压的相位更改为180°,可以更改伺服电机的旋转方向。 根据伺服系统的工作特性,取消控制电压后,电动机应立即停止旋转。然而,众所周知,当单相异步电动机旋转时,即使取消了控制电压,励磁电压的单相电源也继续旋转。换句话说,存在“旋转”现象。这意味着失去控制并且不被允许,因此交流伺服电动机必须解决“旋转”问题。
由于三相异步电动机的特性,可以看出转子电阻对电动机的机械性能有很大的影响,如图5-4所示。如果转子电阻有所增加,如图中的 所示,则最大转矩可能出现在=1附近。为此,伺服电动机的转子电阻
所示,则最大转矩可能出现在=1附近。为此,伺服电动机的转子电阻 设计得非常大,因此当电动机失去控制信号单相运行时,正转矩或负转矩的最大值出现在
设计得非常大,因此当电动机失去控制信号单相运行时,正转矩或负转矩的最大值出现在 处,因此数值为如下:显示机械特性曲线。
处,因此数值为如下:显示机械特性曲线。
 图2不同转子电阻和交流伺服电机的机械特性曲线机械特性曲线
图2不同转子电阻和交流伺服电机的机械特性曲线机械特性曲线
图2中的曲线1是带有控制电压的伺服电机的机械特性曲线,而去除后的曲线 是。脉动磁场被分解为与正旋转磁场和负旋转磁场相对应的两个转矩曲线。该曲线是去除控制电压后的单相电源的复合转矩曲线。从图中可以看出,它与第二和第四象限中异步电动机的机械特性曲线不同。当速度n为正时,电磁转矩T为负,当速度n为负时,T为正。即,在去除控制电压之后的单相电源供给期间的电磁转矩的方向总是与转子相反。旋转,使制动力矩增大。由于存在制动扭矩,转子可以迅速停止旋转,从而避免了“旋转”现象。电机停止旋转所需的时间比制动方法(例如同时取消两相电压
是。脉动磁场被分解为与正旋转磁场和负旋转磁场相对应的两个转矩曲线。该曲线是去除控制电压后的单相电源的复合转矩曲线。从图中可以看出,它与第二和第四象限中异步电动机的机械特性曲线不同。当速度n为正时,电磁转矩T为负,当速度n为负时,T为正。即,在去除控制电压之后的单相电源供给期间的电磁转矩的方向总是与转子相反。旋转,使制动力矩增大。由于存在制动扭矩,转子可以迅速停止旋转,从而避免了“旋转”现象。电机停止旋转所需的时间比制动方法(例如同时取消两相电压 和仅摩擦)所需的时间短得多。这就是为什么在两相交流伺服电动机运行时励磁绕组始终连接到电源的原因。
和仅摩擦)所需的时间短得多。这就是为什么在两相交流伺服电动机运行时励磁绕组始终连接到电源的原因。
增加伺服电机 的转子电阻不仅可以消除“旋转”现象,而且可以扩大稳定的工作范围并增加启动转矩。目前,我们一般使用高电阻材料制成的鼠笼棒,杯形转子的壁很薄,通常只有0.2-0.8mm,因此转子的电阻值比较大,惯性很小。
的转子电阻不仅可以消除“旋转”现象,而且可以扩大稳定的工作范围并增加启动转矩。目前,我们一般使用高电阻材料制成的鼠笼棒,杯形转子的壁很薄,通常只有0.2-0.8mm,因此转子的电阻值比较大,惯性很小。